
Мобильное лазерное сканирование (МЛС) сегодня можно назвать одним из самых высокотехнологичных методов съемки, применяемых в строительстве, при мониторинге деформаций и мобильном картографировании. С помощью данного метода можно проводить съемку изучаемых поверхностей при движении сканера, установленного на транспортное средство, что значительно повышает скорость проведения необходимых работ. Систему МЛС можно устанавливать на любые виды транспортных средств: автомобили, железнодорожные поезда, катера и др., а высокая частота сканирования позволяет осуществлять сбор данных при значительной скорости движения транспортного средства, сохраняя при этом высокую плотность точек. На данный момент по скорости съемки только воздушное лазерное сканирование превосходит МЛС, однако значительно уступает ему в точности.
Система МЛС состоит из двух основных блоков: измерительного и навигационного. Измерительный блок выполняет сканирование местности, а навигационная система осуществляет привязку траектории движения сканера. Сканирование ведется с помощью импульсного метода (измерение времени прохода лазерного импульса от лазерного сканера до точки на изучаемом объекте и обратно, данный метод чаще всего используются для больших расстояний: от сотен метров до нескольких километров; точность данного метода равна нескольким миллиметрам или сантиметрам в зависимости от удаленности объекта и скорости движения транспортного средства с установленным лазерным сканером) или фазового метода (отслеживается отраженный свет, рассеянный или зеркально отраженный, и фаза модуляции мощности по сравнению с переданным светом, по полученной разности фаз определяется расстояние). Между излученным и отраженным сигналом определяется требуемое расстояние, а поскольку координаты прибора известны за счет навигационной системы, то с помощью измеренного расстояния можно определить и координаты точки, отразившей сигнал. Современные лазерные сканеры способны выдавать импульсы частотой до нескольких сотен тысяч в секунду, что позволяет за короткое время получить облако трехмерных точек, достаточно подробно описывающих исследуемый объект.
По назначению сканеры можно разделить на три основных типа: наземные, воздушные и мобильные. При мобильном лазерном сканировании в качестве носителя сканера используется подвижная платформа — автомобиль, железнодорожный поезд или морское судно. Сканирование проводится вдоль траектории движения, на расстояние до нескольких сотен метров во всех направлениях. Плотность точек зависит от скорости движения и расстояния до объекта и может варьироваться от единиц до тысяч точек на 1 м2. Дальность сканирования зависит от отражающей способности объекта сканирования и частоты работы сканера. При отражающей способности 80% дальность составляет приблизительно 250-500 м, при 10 %-й — 75-180 м. При работе в городе на максимальной частоте (600 кГц), достаточно плотно сканируются объекты на расстоянии до 250 метров.

Основное применение МЛС — съемка автомобильных и железных дорог, мостов, путепроводов, городских улиц, береговой линии. Однако существует множество других областей, когда целесообразно использовать системы МЛС: электроэнергетика (создание трехмерных моделей и топографических планов); архитектура и градостроительство (создание трехмерных моделей и обмерных чертежей зданий и городских кварталов, трехмерные ГИС); нефтегазовая отрасль; металлургия и тяжелая промышленность (создание трехмерных моделей промышленных предприятий «как построено», исполнительная съемка); маркшейдерия (подсчет объемов земляных работ, создание ЦМР и трехмерных моделей открытых и закрытых разработок); автомобильные и железные дороги (создание трехмерных моделей дорожного покрытия и земляного полотна в целях разработки проекта строительства или ремонта автодороги, создание трехмерных моделей объектов инфраструктуры, паспортизация дорог, ГИС, исполнительная съемка, создание продольных или поперечных профилей); археология и памятники архитектуры (создание трехмерных моделей архитектурных объектов и исторических памятников, создание обмерных чертежей и сечений).
Мобильное лазерное сканирование позволяет безопасно проводить съемку таких опасных объектов, как высоковольтные электростанции, железнодорожные пути, химические предприятия, что в свою очередь можно отнести к преимуществам данного метода. Кроме того, по сравнению с традиционной топографической съемкой система МЛС позволяет существенно сократить сроки сбора информации.
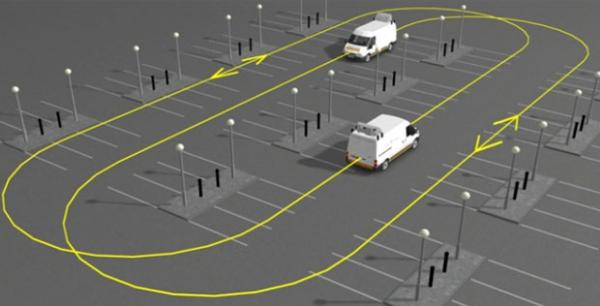
Рассмотрим технологию съемки. Прежде всего, планируется маршрут съемки, который позволит получить максимальную информацию об исследуемом объекте. Далее выбирается наиболее производительный режим работы сканера в зависимости от ситуации. Например, если важно получить информацию о неровностях и трещинах, то подойдет настройка частоты лазера 500 кГц. Для проведения калибровки выполняется калибровочный заезд по запланированной траектории. Пространственные координаты сканерного блока определяются бортовым GPS-приемником, который непосредственно позволяет получить координаты местоположения антенны. Координаты элементов, по которым проводится сверка, известны заранее. К элементам, по которым выполняется определение, относятся вертикальные цилиндрические объекты (фонарные столбы), края бордюра. После обработки данных калибровочного заезда вычисляются поправочные коэффициенты, которые в дальнейшем используют при проведении работ.
После обработки данных калибровочного заезда вычисляются поправочные коэффициенты, которые позже также используются при проведении работ. Работы должны выполняться с соблюдением всех правил безопасности дорожного движения. Автомобиль двигается в крайнем правом ряду со скоростью 10-40 км/ч, что позволяет получать необходимую плотность точек. Сканирование ведется по выбранному заранее маршруту, а обработка данных проводится в специальном программном обеспечении. В результате выполнения проекта с использованием МЛС получается набор полевых данных, в который входят массивы точек отснятых МЛС, траектория движения сканера и данные спутниковых наблюдений на базовых станциях.
Ошибки, наиболее сильно влияющие на результат выполнения съемки:
- Измерения расстояния лазерным дальномером (погрешность определения расстояния, вносимая фазовым детектором, составляет около 0,5 млм );
- Ошибки углов ориентации сканирующей системы (данные ошибки в координатах не превышают 1,5 см в плане и 2,5 см по высоте, за исключением участка проезда под эстакадами при разворотах, где могут наблюдаются скачки до 3–5 см);
- Ошибки текущих координат сканирующей системы, которые по сравнению с первыми двумя ошибками вносят наибольшие погрешности в координаты. Они возникают из-за того, что для получения высокоточных ГНСС-данных требуется максимально «открытое небо», что в условиях городской застройки или при прохождении тоннелей невозможно. Отсутствие ГНСС-данных моментально сказывается на точности съемки.
Главная перспектива развития технологии мобильного лазерного сканирования — улучшение технических свойств компонентов системы ГНСС: более быстрый захват сигнала при выходе из зоны потери сигнала, а также совершенствование параметров инерциальной системы. К перспективам развития относятся комбинирование данных мобильного и стационарного лазерного сканирования с воздушным лазерным сканированием и автоматизация обработки массива получаемых сырых данных.
Стоит отметить, что на сегодняшний день МЛС представляет собой наиболее перспективный метод в определенных областях геодезических работ. Частота лазерного сканера, а также производство работ в движении позволяют в короткие сроки получить приемлемый результат с достаточно высокой точностью. Объем данных при использовании МЛС невозможно получить с помощью обычных геодезических приборов, а избыточность этих измерений позволяет исключить повторный выезд бригады геодезистов в случае обнаружения ошибок или недостаточности данных, отснятых электронным тахеометром.



